
Matlab and 1B dynamics for CUED students
In the dynamics course, students are introduced to spring and damper systems. The formulae describing these are in CUED's "Mechanics Databook". Here matlab is used to illustrate the behaviour that's summarised on pages 6-9 of the databook.
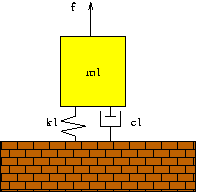
A single mass
 For a system where
For a system where
- m = mass
- f = force
- k = stiffness
- λ = damping
the mechanics databook (p.8) gives the formula
where ζ (the damping ratio) is λ/2*sqrt(km), and ωn (the natural frequency without damping) is sqrt(k/m). Matlab can solve this ODE. If you put the following code into a file called springs.m and run it, you'll get a graph rather like the one on p.7 the data book. Note that I've changed the notation - removing the greek characters and adding digits to the variables so that we can deal with more masses in the future.
function springs m1=10; c1=10; % damping k1=10; % stiffness f=10; % initial force x=f/k1; dampingratio=c1/(2*sqrt(k1*m1)); % Without damping, the natural frequency is w w=sqrt(k1/m1); % Y=x/(2*dampingratio*sqrt(1-dampingratio*dampingratio)) natfreq=sqrt(k1/m1) wdamped=natfreq * sqrt(1-dampingratio*dampingratio) initial = [0; 0]; for para=[0, 0.1, 0.25, 0.5, 1, 1.5] [T,Y] = ode23(@yprime2, [0, 20], initial,[],x,w,para); plot(T,Y(:,1)/x); hold on end function dy = yprime2(t,y,x,w,dampingratio) dy= [y(2); - 2*dampingratio*y(2)*w - y(1)*w*w + x*w*w];
See the Matlab and ODEs page for details about the maths.
On p.6 of the databook 2 more formulae are introduced
- Critical damping is the damping strength that is just enough to prevent any oscillation. λcrit = 2mωn
- The natural frequency when there's damping (ωd) is ωn/sqrt(1- ζ2)
Of interest is the maximum displacement (see p.8 of the databook). If ζ < 1/sqrt(2) this will be X/(2ζsqrt(1-ζ2)) when ω/ωn = sqrt(1-2ζ2) (the resonant frequency)
The formulae on p.8 are implemented in the matlab routine below. If you put the following code into a file called springs2.m and run it, you'll get a graph rather like the first one on p.9 of the data book. The lines on the graph correspond to ζ (the damping ratio) having the values 0.1, 0.2, 0.3, 0.5, 1, and 1.5.
function springs2
m1=10;
k1=10; % stiffness
natfreq=sqrt(k1/m1);
clf
freqrange=0.01:0.1:2;
for dampingratio=[0.1 0.2 0.3 0.5 1 1.5]
if dampingratio < 1/sqrt(2) ;
wmax= natfreq*sqrt(1-2*dampingratio^2);
responsemax=1/(2*dampingratio*sqrt(1-dampingratio^2));
disp(sprintf('max response for dampingratio=%.3f',dampingratio))
disp(sprintf(' is %.3f at freq=%.3f', responsemax, wmax))
plot(wmax,responsemax,'or');
end
element=1;
for freq=freqrange
y(element)=realform(natfreq, dampingratio, freq);
element=element+1;
end
plot(freqrange,y)
hold on
end
function y=realform(omegan, dampingratio, omega)
omegaratio=omega/omegan;
y= 1/sqrt((1-omegaratio^2)^2 + (2*dampingratio*omegaratio)^2);
The following code uses the "real form" formula on p.8. When put into a file called springs3.m it should generate something similar to the lower graph on p.9 of the databook. The lines on the graph correspond to ζ (the damping ratio) having the values 0.1, 0.2, 0.3, 0.5, 1, and 1.5.
function springs3 m1=10; k1=10; % stiffness natfreq=sqrt(k1/m1); clf freqrange=0.01:0.1:2; for dampingratio=[0.1 0.2 0.3 0.5 1 1.5] element=1; for freq=freqrange y2(element)=tanphi(natfreq, dampingratio, freq); element=element+1; end y3=atan(y2)*180/pi; y3(y3>0) = y3(y3>0)-180; plot(freqrange/natfreq,y3) hold on end function y=tanphi(omegan, dampingratio, omega) omegaratio=omega/omegan; y= (-2*dampingratio*omegaratio)/(1-omegaratio^2);
n.b. The maths on this page should display ok on-screen. It may well not print out properly