 |
Department of Engineering |
 |
|
The dynamics program
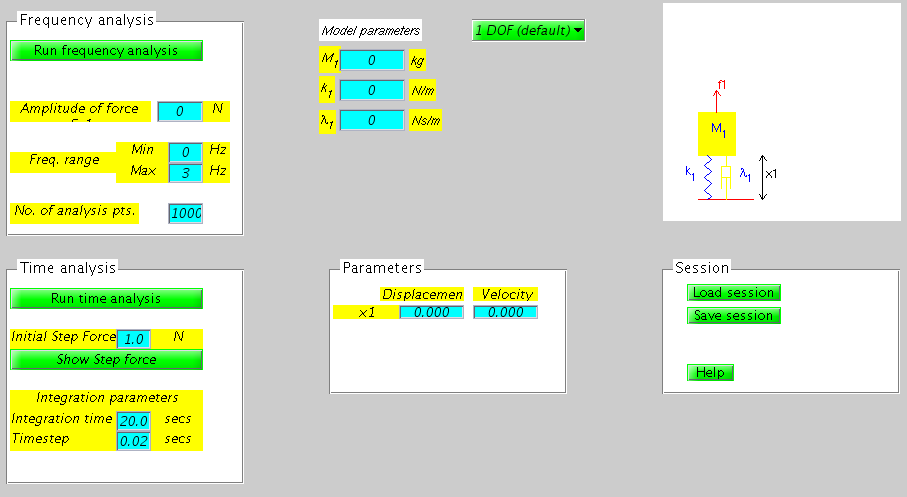
Introduction
| dynamics is a program used in the 1B course to
model simple spring-dashpot systems. Start the program by typing
dynamics
It's a matlab-based program, so you can use the usual matlab methods of
producing output. Details on particular features are described below.
To enlarge the screen-dumps in this document, just click on them.
|
|
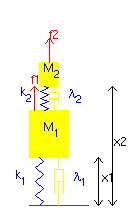
Model
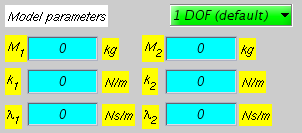 | Use this panel to choose
how many bodies will be in the system and change system
values |
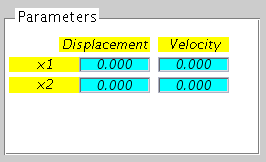 | Use this panel to set
initial conditions |
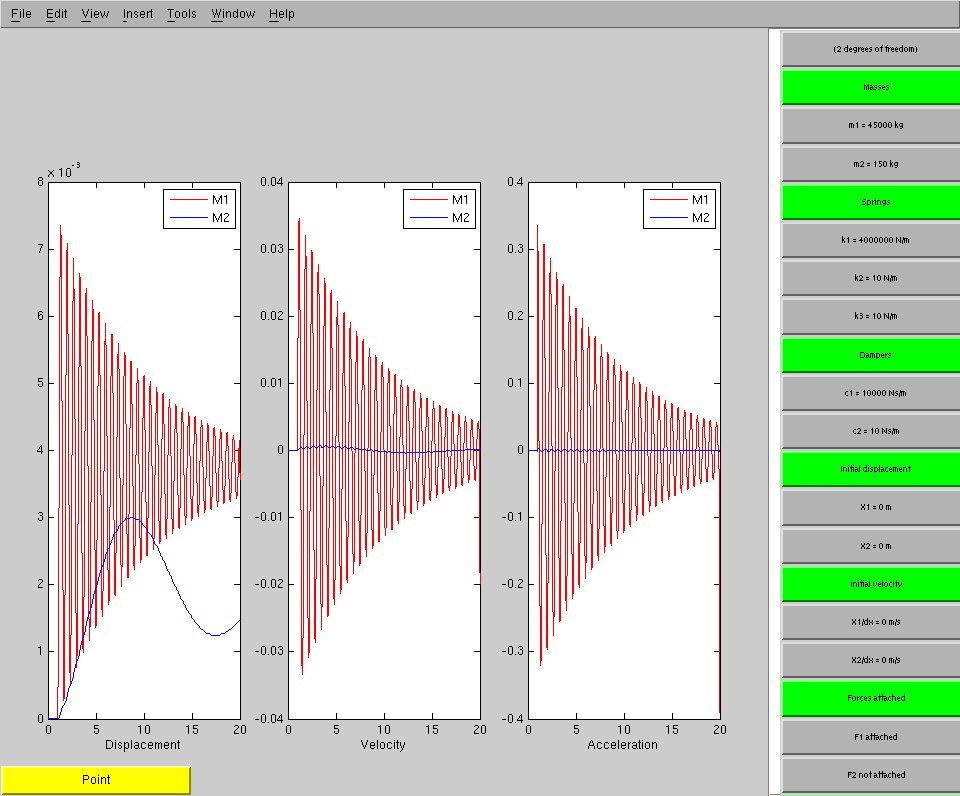
Time Domain
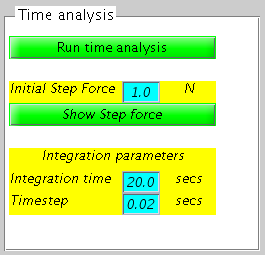
Use the Time Domain panel to select parameters. A default step
force (15kN) is already loaded - the 'Show Default Step force' button
display it. Then press the 'Run time analysis' button. Output will be like
the picture on the right when there are 2 degrees of freedom. |
|
Frequency Domain
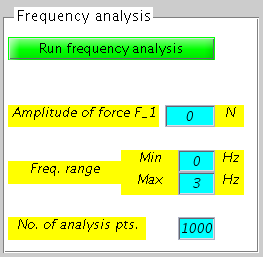
Use the Frequency Domain panel to select parameters. Then press the
'Run frequency analysis' button. Output will be like
the picture on the right when there are 2 degrees of freedom. |

|
Utilities
- Printing - Use the "Print..." and "Page Setup" menu options. To save images into files use the "Save as" menu option.
- Zooming - The "Tools" menu includes a Zoom option which you can
sometimes access using
 buttons under the menubar. When zoom is on, click the left mouse button in a figure to zoom in on the point under the mouse. Click the right mouse button to zoom out.
buttons under the menubar. When zoom is on, click the left mouse button in a figure to zoom in on the point under the mouse. Click the right mouse button to zoom out.
- Points - to obtain numerical values from graphs, click on the graph's
 button then click on the point of interest. The coordinates displayed will be of the point of the graph whose x-coordinate is nearest to the x-coordinate of your cursor.
button then click on the point of interest. The coordinates displayed will be of the point of the graph whose x-coordinate is nearest to the x-coordinate of your cursor.
- Save/Restore sessions - lets you save and restore system parameters.
Background
The code is partly
a conversion of Fortran code written by Dr Ruth Thomas, partly an
adaption of matlab code written by Cristian Gutierrez Acuna (from the Matlab Central archive) and partly written by Will Hoult (CUED). Some of the
theory is on our
Matlab and 1B dynamics page.
Mail bug reports to
Tim Love (tpl)